发布时间:2024-05-06 04:01:18来源:米乐M6官网备用网站 作者:米乐m6官网登录入口
硅基光电子技术的发展可以将激光雷达系统发射模块和接收模块中分立的有源和无源器件集成在芯片上,使激光雷达体积更小、稳定性更强、成本更低,推动激光雷达在自动驾驶等领域的应用。
据麦姆斯咨询报道,针对该领域发展概况,西南技术物理研究所研究陈孝林团队进行了综述分析,包括激光雷达的基本概念和常见激光雷达的测距原理,分析了常见硅基片上激光雷达系统的扫描方案,并讨论了硅基片上激光雷达当前面临的挑战和发展方向。相关研究内容以“硅基片上激光雷达技术综述”为题发表在《激光与光电子学进展》期刊上。
综合考虑大气窗口、人眼安全以及可选用的激光器和光电探测器,激光雷达使用的波长通常为0.8~1.55 μm,对应使用的激光器和探测器类型如表1所示。由于车载激光雷达工作时可能面临的环境温度具有很大的变化范围,因此当系统中采用滤光片抑制背景光干扰时,激光器的输出波长在温度影响下发生变化时应始终保持在滤光片的通带内,这也是在选择光源时需要考虑的问题。

当前激光雷达的主流波长是905 nm和1550 nm。脉冲激光雷达采用905 nm激光器,主要优点是可以采用较为便宜的硅基探测器,并且905 nm相比1550 nm亲水性较弱,光损失更小。但由于硅材料的透明窗口,它不能用在硅光子系统上。因为905 nm激光可以穿透人眼玻璃体到达敏感的视网膜,为避免视网膜损伤,它的峰值功率受到限制。1550 nm适用于长距离连续波激光雷达系统,由于光在人眼的前半部分被吸收,不会危害视网膜,激光出射功率可以更大。这一波长通常用于通信设备,具有丰富的技术储备,并且可以以低成本获得连续波激光源。
探测距离指激光雷达能发现目标的最大距离,主要受到激光信号发射功率的制约。对于脉冲激光雷达,探测距离还与信号的重复周期T有关,因为只有当回波信号在时间T内返回接收系统时才可以解算出正确的目标距离信息,而超出这一时间段返回的回波信号则因为与后续回波无法区分而导致距离模糊。对于调频连续波(FMCW)激光雷达,探测距离也受到激光线宽Δν的影响。Δν越窄,激光信号的相干长度Lc就越长,而对于相干长度以外的目标,其回波信噪比会大大降低而难以被系统识别。此参数一般由激光雷达对于10%低反射率目标物的最远探测距离得到,实际应用中由于环境和目标表面情况的变化,数值并不是绝对的。
视场角(FOV)指激光雷达可以探测到的区域范围,单位通常以°表示。对于车载环境应用,激光雷达视场角必须包括水平视场角(HFOV)和垂直视场角(VFOV),视场角越大说明激光雷达对空间的角度覆盖范围越广,对周围环境的感知范围越大。
测量精度是精确度与准确度的结合。精确度指激光雷达在同一条件下多次测量得到的距离值的一致程度,而准确度指激光雷达测得的距离分布的均值与真实距离的接近程度,二者分别受测量过程中的随机误差和系统误差影响,如图1所示。其中,距离测量的准确度主要受光信号产生和测量系统影响,角度测量的准确度则主要受发射端激光转向扫描的准确性影响。

测量分辨率具体包括距离分辨率和角分辨率。距离分辨率指激光雷达单次测量中目标能被区分的最小距离。对于脉冲激光雷达,脉冲宽度越窄则距离分辨率越高;对于FMCW激光雷达,距离分辨率与调制带宽成反比,并受调频线性度影响。角分辨率指激光雷达单次测量中目标能被区分的最小角度,增加发射孔径是提高角分辨率的有效手段。
脉冲飞行时间法(TOF)采用直接探测方式,通过测量激光信号从发出经目标反射到被探测系统采集的时间实现目标距离的测量。脉冲激光雷达的测距原理和系统设计都比较简单,如图2所示。

脉冲激光雷达存在模糊距离,因为回波信号相对于发射信号是否偏移一个或多个周期存在着不确定性。此外,由于发射机到接收机的链路上光脉冲能量存在散射损耗,因此信噪比也是限制脉冲激光雷达探测范围的主要因素。为了提高作用距离,需要增加脉冲发射功率,对于自动驾驶应用,需要考虑人眼安全功率极限。一种方法是使用脉冲串来降低单个脉冲所需的高功率,通过积分并平均接收的功率来提高信噪比和精度。尽管存在这些限制,脉冲激光雷达简单的探测原理和实现方式使其具有强大的竞争力。
调幅连续波(AMCW)测距法也称间接飞行时间法。在调幅连续波激光雷达中,激光出射之前进行了幅度调制,调制周期大于往返飞行时间,对回波信号和出射信号进行比较。对于调幅连续波测量方法,距离分辨率由测距信号频率和相位计分辨率共同决定,距离分辨率随着调幅信号频率增加而增加。与脉冲激光雷达一样,调幅连续波激光雷达的回波信号相位经过2π 相移后开始重复,为避免多解问题,测距范围会相应减小。一种解决方法是选取一个调制频率高的调制光波作为基本测尺,再引入一个或多个调制频率较低的调制光波作为辅助测尺,综合每个测尺的测量结果以获得精确的测量值。
随机调制连续波(RMCW)测距法将伪随机比特序列(PRBS)调制到出射激光的幅度或相位上,通过使用匹配滤波器等方式计算接收到的返回激光信号与PRBS的原始模板之间的相关性来获得接收光的飞行时间,如图3所示。由于PRBS只与自身相关,因此RMCW激光雷达对阳光、灯光和其他激光雷达的光等不敏感。然而,此技术对相对速度、激光相位噪声和散斑具有敏感性,这是较大的技术挑战。在激光雷达应用领域,澳大利亚初创激光雷达公司Baraja是RMCW技术的典型代表,该公司采用RMCW技术结合独特的棱镜色散光谱扫描技术研制出型号为Spectrum HD的车载级雷达。

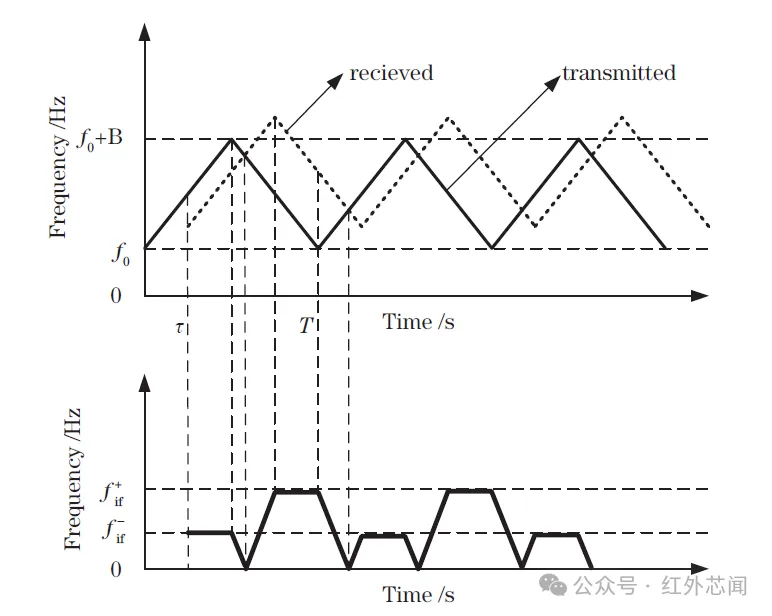
FMCW激光雷达采用频率随时间周期性变化的调制信号进行探测,返回的光信号与本振光信号相干,根据混频产生的中频信号的频率可以测量目标物的距离,它的信号调制形式有三角波、锯齿波、正弦波等。其中,正弦波调制信号检测物体时需要调节信号频偏,因此大多应用于只有一个探测目标的情况,对于自动驾驶应用中对多个目标的探测需求,一般采用三角波或者锯齿波。三角波可以同时得到物体的距离和速度信息,锯齿波则主要用来测量物体的距离。对于三角波探测,当目标运动时,信号发生多普勒频移,反射信号和本振信号之间的频率差在线性调频的上升段和下降段具有不同的拍频频率,如图4所示。
与脉冲测距法相比,FMCW测距具有许多优势。第一,它采用相干探测,不受阳光、城市人造光及附近的其他激光雷达系统的干扰,提高了信噪比。第二,它可以通过检测信号的多普勒频移来直接获取目标的运动速度。第三,它的探测精度取决于线性调频带宽和信噪比,可以通过相对低频的接收器电子设备实现,相比之下脉冲测距精度受到接收器带宽的限制。第四,它的检测灵敏度高,不需要很高的激光功率,因此也不会在波导中产生非线性效应,加上它不需要用到雪崩光电二极管(APD)和高速检测电路,所以适应激光雷达的硅基集成化发展。它的主要技术难点在于线性调频光信号的获取,解决方法有采用干涉仪、光频梳、微谐振器等校准扫频激光器,或者在外部级联光调制器等。
flash脉冲激光雷达的工作模式类似于照相机,它基于TOF原理,系统发射具有高重复频率的脉冲光束,脉冲光束完全照亮整个视场。由于空间中存在目标物,探测器阵列中每个单元获取的光子具有不同的飞行时间,据此可以获得距离信息,实现三维成像。荷兰代尔夫特理工大学演示了一种flash激光雷达。图5a给出了该雷达系统使用的单光子雪崩二极管(SPAD)芯片,它采用0.18 μm CMOS工艺制造,尺寸为21.6 mm × 10.2 mm,具有252 pixel × 144 pixel和1728个12位时间数字转换器(TDC),其上约70%的面积为部分直方图读出电路(PHR),作用是将原始数据处理为直方图数据输出,压缩输出的数据量。芬兰奥卢大学提出的flash激光雷达系统采用了基于块的分段照明策略,如图5b所示。西安电子科技大学采用0.18 μm HV CMOS工艺制造了2.9 mm × 2.9 mm的flash脉冲激光雷达芯片,如图5c所示。该团队利用基于此芯片的激光雷达系统成功演示了4.5 m处的室内3D成像,在超过20 m的室外测距实验中,相对测量误差不超过0.35%,如图5d所示。

flash激光雷达的系统中没有运动部件,具有抗振动、体积小、价格低等优点。其点云是由单次激光脉冲生成的,而非逐点构建,因此可以解决时间同步问题。其缺点是需要较高的激光峰值功率以同时照亮大的空间区域,信噪比低,检测距离和视场有限,性能还会受到目标物反射率的影响。由于雷达的距离分辨力率和角分辨率直接受限于探测器阵列的规模和性能,而大规模阵列意味着大数据处理量,因此成像分辨率和成像速度之间需要进行平衡。此外,从目标表面反射的回波信号往往很弱,探测器往往需要采用昂贵的SPAD。
OPA中主要包括分光器、移相器和天线个部分。其中,移相器为光信号引入相位延迟,主要通过热光效应或电光效应实现,天线通常采用光栅耦合器、边缘耦合器或端射耦合器的形式。OPA通过控制光通过微波导的相位,从而控制波前的形状和方向,实现光束偏转。
2017年麻省理工学院电子研究实验室首次在硅光子芯片上展示了采用三角波调制的FMCW激光雷达,如图6所示。美国Analog Photonics公司展示了相干二维固态激光雷达原型系统,其中使用了两个大型OPA,首次展示了使用OPA实现的实时3D相干激光雷达系统,获取的图像如图7所示,其。




米乐m6官网登录

画屏

移动健康









