发布时间:2024-04-29 19:55:56来源:米乐M6官网备用网站 作者:米乐m6官网登录入口
针对三相全波六状态工作无刷直流电机霍尔位置及特定换相逻辑下的电机旋向问题,提出一种通过右手螺旋定则确定每相绕组磁势方向进而确定电机霍尔位置,随后通过左手定则及牛顿第三运动定律对电机旋向进行判断的简易方法;并通过两款电机实际工程验证,确定该方法的正确性及普遍适用性。
无刷直流电机与有刷直流电机相比,不会产生有刷电机换相火花现象以及随之带来的电刷磨损问题,具有寿命长、噪声低、免维护等优点[1],因此其在空间飞行器领域广泛运用,并逐步取代了传统有刷直流电机。由于无刷直流电机通过逻辑开关电路实现电子换相,因此其需要位置传感器对转子磁极位置进行检测,以保障电子换相的准确性。霍尔位置传感器由于结构简单、易集成、占地小等优势,目前使用率最高[2]。精确确认霍尔传感器位置是确保电机高效运行的关键所在,本文主要对目前常用的三相全波六状态工作方式绕组星形连接的无刷直流电机霍尔传感器正确位置及电机旋向确认方法进行介绍,并结合工程实际案例进行说明。
(4)示例电机铁芯为直槽结构,针对斜槽电机,根据斜槽方式的不同,磁势需旋转斜槽角度的一半,具体旋转为从出线端看,同一槽如果轴伸端槽口位于出线端槽口左侧则逆时针旋转,如果轴伸端槽口位于出线端槽口右侧则顺时针旋转。
在绘制电枢绕组磁势向量星形图前需绘制电机电枢绕组图。工程上,电枢绕组图可根据工程仿真软件所绘绕组分布图直接画出,本文依据Ansoft仿真软件中绕组分布图进行绘制。Ansoft所示绕组分布图视图方向为从电机轴伸端视之,绕组分布图中相序标记前为“-”表示电流方向为垂直纸面流入,相序标记前无符号表示电流方向为垂直纸面流出。
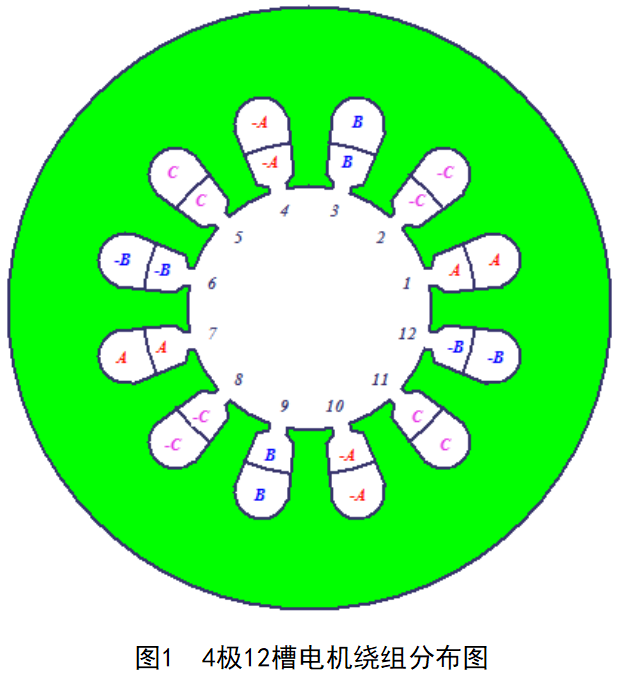
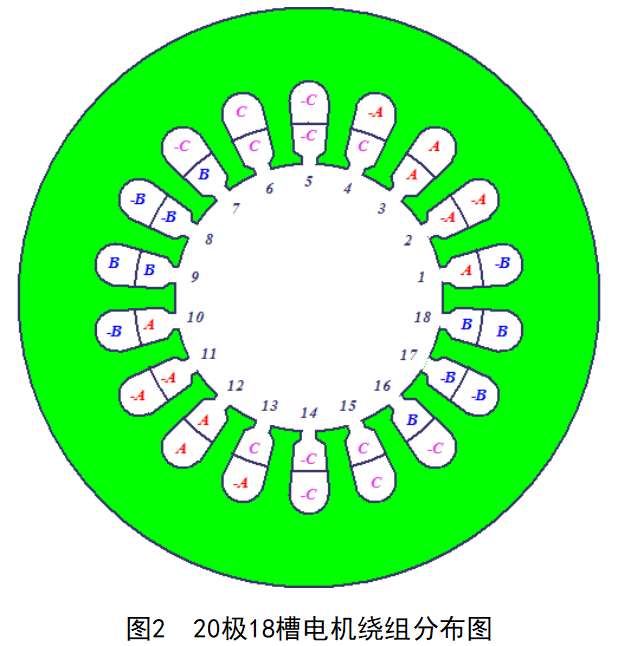
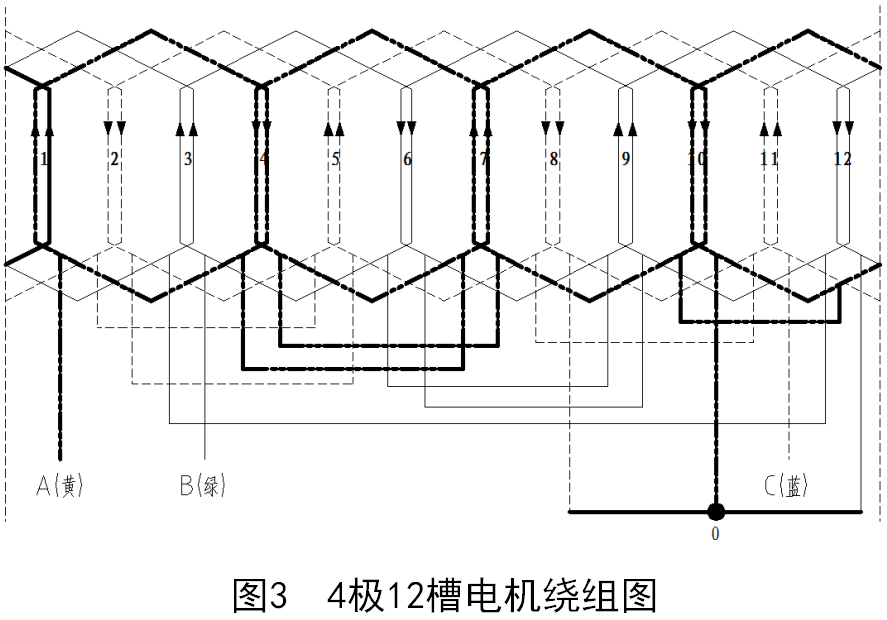
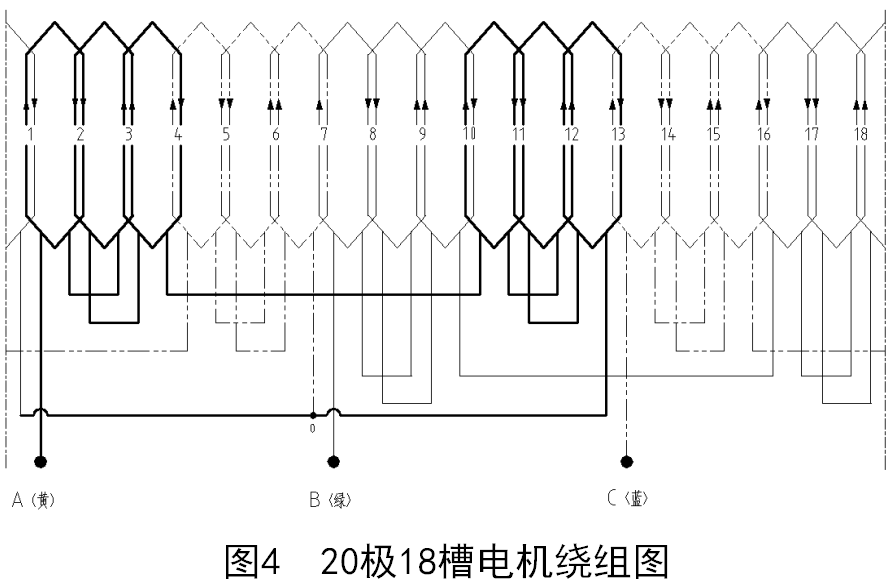
根据绕组分布图及Ansoft中电流方向定义可绘制两款电机电枢绕组图,分别如图3、图4所示,图中箭头方向为电流方向,序号表示铁芯槽号。
通过分析,电机霍尔传感器位置位于磁势轴线上,对于三相无刷电机,无论其绕组结构如何,在1对极下,共有两组6个霍尔传感器位置可供选择[3-4]。霍尔HA、HB、HC分别位于磁势FB、FC、FA或-FB、-FC、-FA位置[5]。
通过图3所示绕组图及右手螺旋定则可绘制出图5所示的4极12槽电机A相绕组磁势图,磁势图视图方向为电机尾部出线槽代表A相电流垂直纸面流入,4槽及10槽代表A相电流垂直纸面流出。同理,可将该4极12槽电机绕组磁势全部绘出,如图6所示。
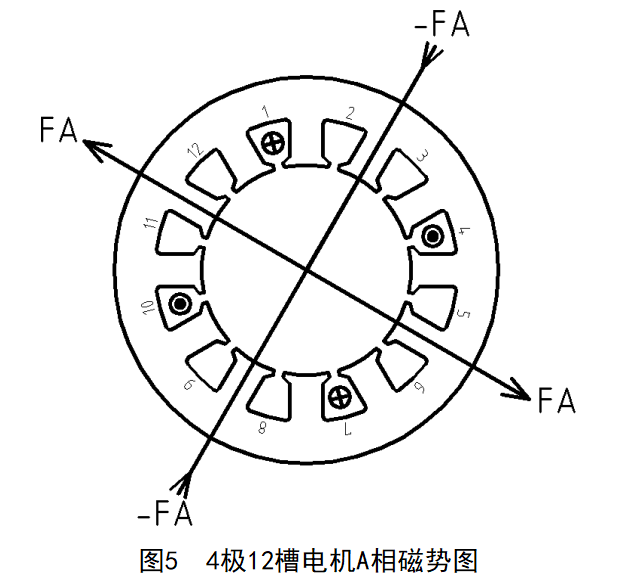

进一步观察可以发现,对于整数槽电机,各相磁势皆位于各齿中心线个霍尔传感器位置,因此所有齿中心线为该类电机所有允许分布的霍尔传感器位置。
对于分数槽集中绕组电机,由于三相绕组未均匀间隔分布,因此需要通过矢量合成方式绘制三相绕组每相合成磁势,随后通过阵列的方式绘出所有磁势方向。通过图4所示绕组图及右手螺旋定则可绘制出图7所示的20极18槽电机绕组合成磁势图,磁势图视图方向为电机尾部出线端视之。通过阵列方式可绘制该电机所有磁势,如图8所示。
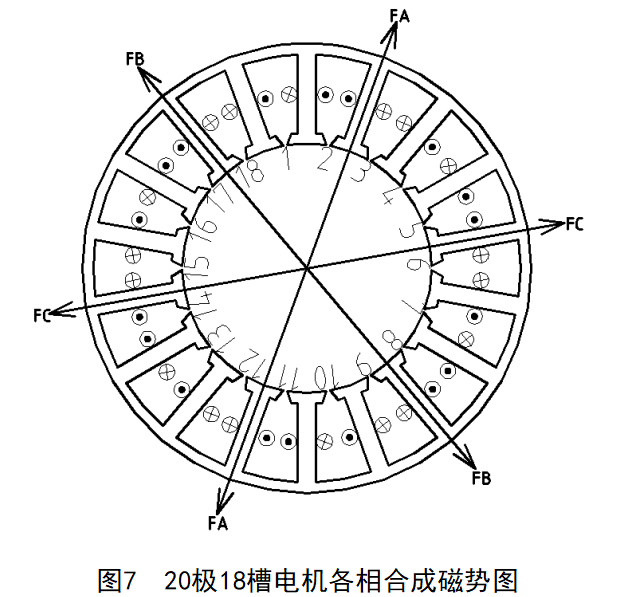

通过观察示例电机磁势图可以发现,相邻两磁势间方向相反,A、B、C三相磁势依次交替分布。对于极对数较多的情形,可通过该结论判断磁势图绘制的正确性。
通过上文分析拟选定两款电机,霍尔传感器位置分别如图9、图10所示,20极18槽电机为霍尔双备份结构。
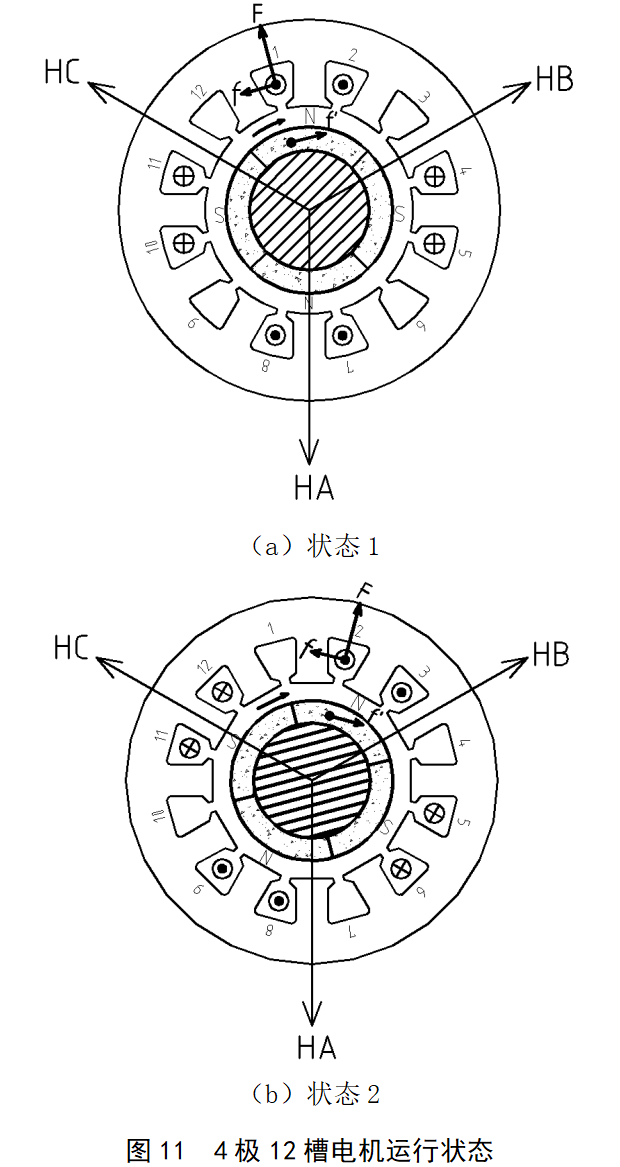
假定4极12槽电机转子初始位置如图11(a)所示。该电机霍尔标志面背对磁钢,此时霍尔HA、HB、HC输出线,绕组电流由C相通至A相,A相、C相所在槽电流方向为1槽、2槽、7槽、8槽垂直纸面流出,4槽、5槽、10槽、11槽垂直纸面流入。状态1时磁钢N极与1槽相对,槽中导体磁场方向为F,根据左手定则,此时槽中导体所受电磁力方向为f,根据牛顿第三运动定律,施加于转子磁钢上的反作用力方向为f′。同理,可对其他槽内导体进行分析,此时电机转子呈现图示顺时针方向运动趋势。当转子运行至图11(b)所示状态2,此时霍尔HA、HB、HC输出线,槽内电流方向及转子受力方向如图11(b)所示,经分析电机仍保持顺时针方向运动。通过上述方法可对电机6个状态进行分析,出线端视之电机皆顺时针运行。因此,当电机霍尔传感器处于图9所示位置,电机按表1所示真值进行换相,则出线端视之电机顺时针旋转。
假定20极18槽电机转子初始位置如图12(a)所示,该电机霍尔标志面朝向磁钢,此时霍尔HA、HB、HC输出线,按上述分析方法,此时槽内电流方向及转子受力方向如图12(a)所示,电机转子呈现图示顺时针方向运动趋势。当转子运行至图12(b)所示状态2,此时霍尔HA、HB、HC输出线,槽内电流方向及转子受力方向如图12(b)所示,经分析电机仍保持顺时针方向运动。通过上述方法可对电机6个状态进行分析,出线端视之电机皆顺时针运行。因此,当电机霍尔传感器处于图10所示位置,电机按表1所示真值进行换相,则出线端视之电机顺时针旋转。
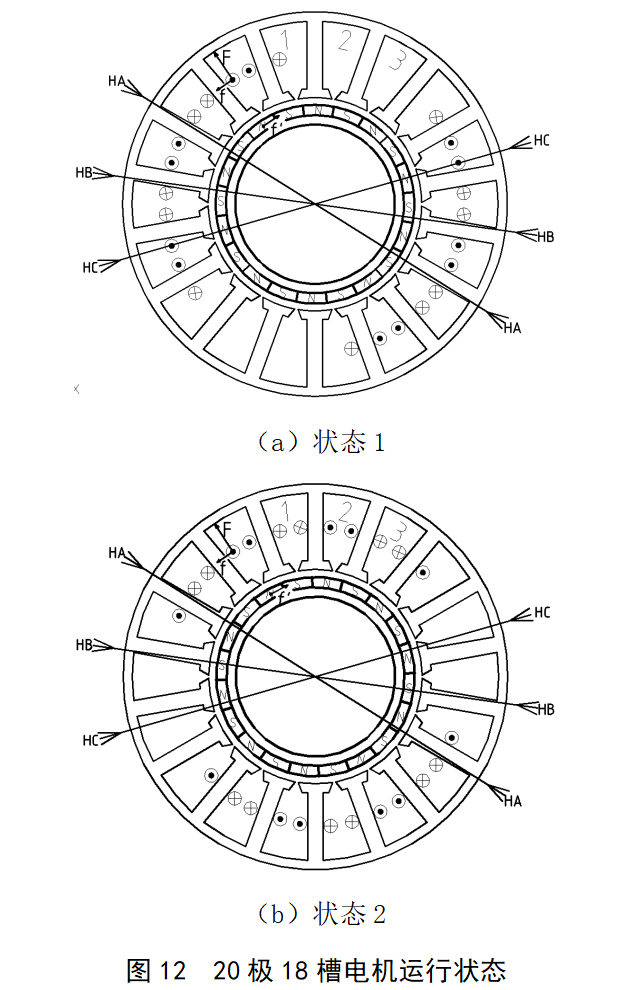
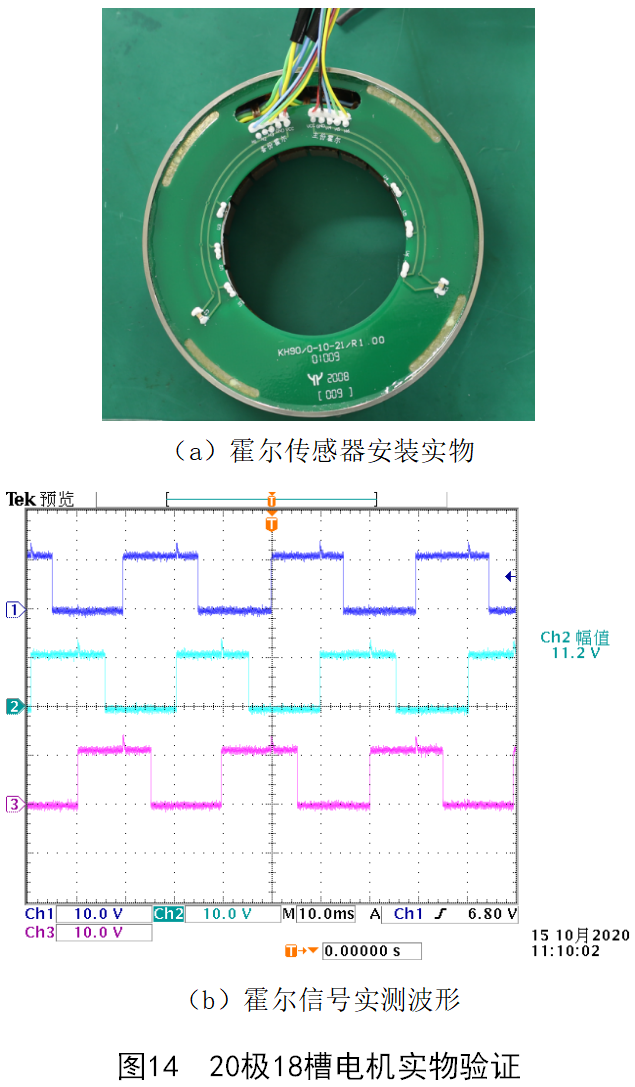
图13(a)及图14(a)分别为两款电机霍尔传感器实际安装位置示意图,安装位置与理论分析位置一致。图13(b)及图14(b)为两款电机出线端顺时针运行时霍尔传感器输出波形,波形从上到下依次为霍尔HA、HB、HC输出波形,霍尔真值变化情况与分析结果一致。

本文通过上述两个例子,验证了上述霍尔传感器位置及电机旋向确认方法的准确性。针对两相导通三相六状态电机,无论是整数槽绕还是分数槽绕,上述方法均具有普遍适用性。上述方法所得出的霍尔传感器位置为该类电机所有霍尔传感器位置,实际运用过程中可根据空间结构、尺寸等限制条件选取满足要求的霍尔传感器位置。
1 引言 无刷直流电机(BLDC)具有体积小,无机械触点,寿命长,安装方便的优点,一直都是电机应用的研究热点。目前无刷电机控制基本上都是采用霍尔传感器作为转子位置反馈元件,但位置传感器的存在不仅增加了电机的体积和成本,很大程度上还成为电机的故障源之一,使系统可靠性降低。所以无位置传感器的无刷电机控制方案业已成为当前的研究热点。 近年来,采用数字控制的无位置传感器控制技术,已逐渐成为今后无刷电机控制的发展趋势。在此采用Actel公司的Fusion系列混合信号FPGA为核心,设计了一款无位置传感器无刷电机。采用Fusion内部特有的12位多路高速A/D转换器,实现电机反电动势检测,使用内嵌的51软核实现
/
新能源汽车主要靠电力驱动系统来完成对汽车电机的控制和一些辅助功能的实现,新能源汽车蓄电池组是电力驱动的来源,新能源汽车的电量检测系统则显示了新能源汽车蓄电池组当前的状态,与电力驱动系统的正常运作息息相关,而目前的新能源汽车蓄电池组在电量检测时,常常因电量检测系统灵敏度不够,电量显示不准确造成蓄电池组管理不当,影响其使用寿命。 针对上述情况,为克服现有技术之缺陷,本文目的在于提供新能源汽车的电量检测系统,具有构思巧妙、人性化设计的特性,可以有效地提高对新能源汽车蓄电池组电量检测的灵敏度,从而提升电量检测系统的精确性。 图1 新能源汽车的电量检测系统的电路模块图 其解决的技术方案是,新能源汽车的电量检测系统,包括电流采样电路、
在新能源汽车电量检测系统中的应用 /
无刷电机之父是谁 无刷电机的发明者和先驱可以追溯到20世纪60年代,当时德国的电气工程师Werner Gartner首次提出了无刷直流电机的概念和设计。 在随后的几十年里,无刷电机得到了广泛的研究和应用,许多科学家、工程师和企业家都为无刷电机的发展做出了重要的贡献。 不过,如果要说无刷电机之父,那么就要提到日本电机工程师Takashi Kenjo。在20世纪80年代初期,Kenjo与其团队开始研究无刷电机技术,并于1982年研发出了世界上第一款商业化的无刷电机。这款电机采用了新型的永磁体材料和独特的控制算法,大大提高了效率和性能,成为了无刷电机技术发展的重要里程碑。随后,Kenjo还在无刷电机领域做出了许多
在这个世界上,除了特斯拉之外的绝大多数新能源电动车卖相都差了点。比如丰田的混合动力轿车普锐斯,公认的看法是普锐斯长得像一台洗衣机。至于雪佛兰的纯电动汽车Spark EV,也以古怪闻名。 不过论及造型之奇突,以上所有车型都敌不过最近法国街头悄然出现的一种新型电动汽车——Viseo。 Viseo 的横空出世让很多人都大跌眼镜,Viseo的制造商IrisFrance公司也从来没有掩饰过这辆车的与众不同,Iris称Viseo具备许多“科技爆点”。 Viseo是一辆只供驾驶员乘坐的一人座轿车,除此之外,正常情况下Viseo和其他普通轿车也没什么太大的差别。但是这种车的出现会让所有迷恋《变形金刚》的人都很欣慰,街
摘要:介绍了ML4425脉宽调制电机的功能及其应用。 关键词:三相直流无刷电机;无传感器;反电势取样器;锁相环 1 引言 ML4425脉宽调制具有为起动和控制△接或Y接无刷直流(BLDC)电机速度所需要的全部功能,并且不用霍尔传感器。从电机绕组传感的反电势电压信号,利用锁相环(PLL)即可确定正确的换向时序,这一获专利的传感技术可以在宽范围内使三相无刷电机换向,并且对PWM噪声和电机缓冲电路的干扰不敏感。 ML4425利用恒定的停歇时间PWM控制环。




米乐m6官网登录

画屏

移动健康









